【7】ICRA2025_11_20 每天10篇机器人论文-今天是文章汇总11-20
【Paper 10】《Fieldscale: Locality-Aware Field-based Adaptive Rescaling for Thermal Infrared Image / Fieldscale:热红外图像的局部感知、基于场的自适应缩放》
-
机构:首尔国立大学机械工程系 Department of Mechanical Engineering, Seoul National University
-
作者:Hyeonjae Gil, Myung-Hwan Jeon, Ayoung Kim
-
领域关键词:热红外成像、图像重标定、局部感知、自适应增益、视觉感知
-
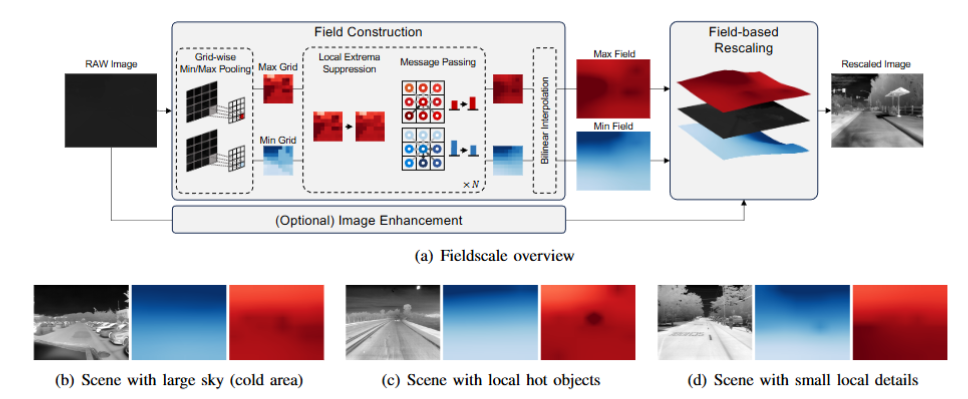
要解决的问题:热红外相机原始图像通常是 14 位,而很多视觉任务和后续算法只方便处理 8 位图像。传统做法多用全局 1D 查找表统一压缩动态范围,但热源往往具有明显局部性,结果就是局部热点附近的细节容易丢、整体对比度也会被破坏。
-
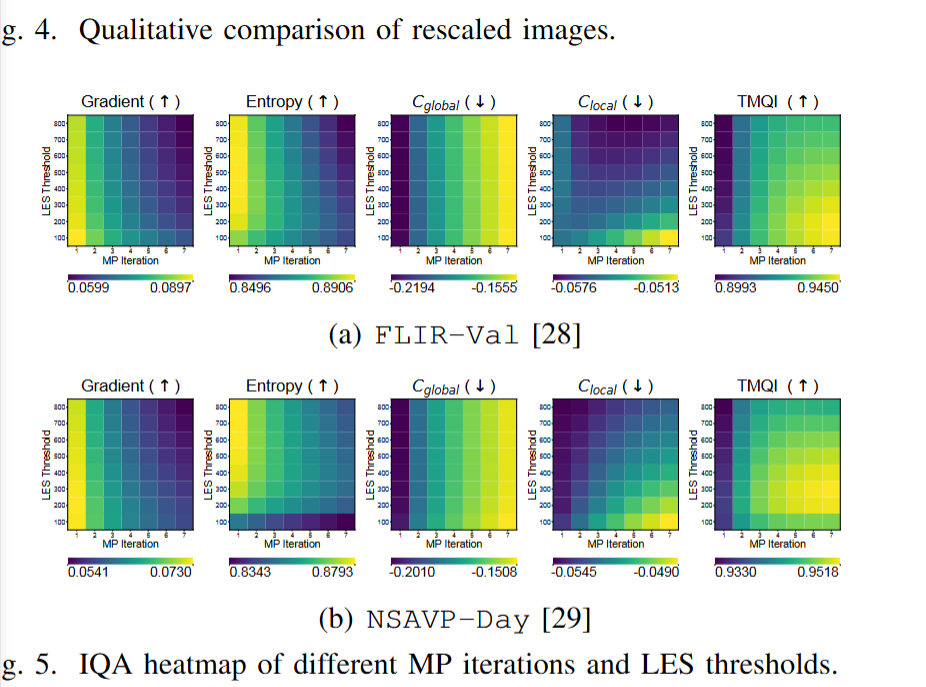
解决方法:作者提出 Fieldscale,用一个“局部感知的 2D 场”同时编码像素强度和空间上下文,而不是只看单个像素的灰度值。这样每个区域都能自适应决定自己的增益,既保留局部细节,又尽量维持全图的空间一致性。和传统线性或非线性的 1D LUT 方法相比,它更贴合热红外图像“热量分布不均匀”的本质。
-
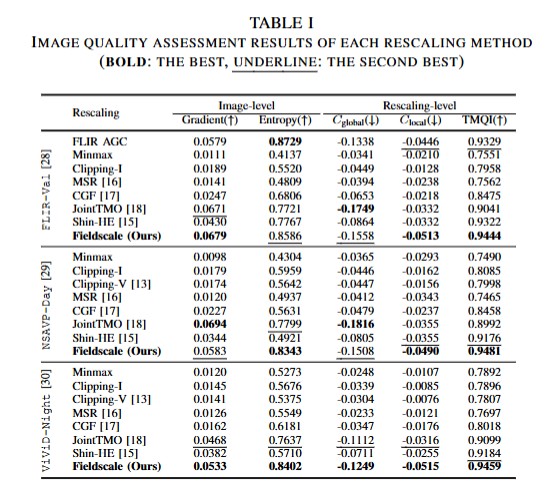
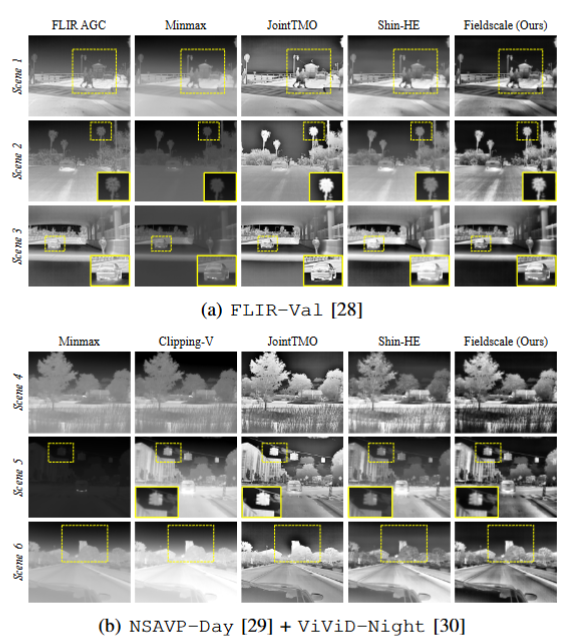
解决效果:论文在图像质量评估和两个下游任务上都验证了该方法,结果表明 Fieldscale 能持续提升图像可见性并减少信息损失。作者没有在摘要中列出具体百分比,但明确说明其性能优于传统重标定方案,而且代码已开源,方便后续复现和应用。
【Paper 11】《CoPeD-Advancing Multi-Robot Collaborative Perception: A Comprehensive Dataset in Real-World Environments / CoPeD:推进多机器人协作感知的真实世界综合数据集》
-
机构:纽约大学 New York University;美国陆军作战能力发展司令部陆军研究实验室 U.S. Army Combat Capabilities Development Command, Army Research Laboratory
-
作者:Yang Zhou, Long Quang, Carlos Nieto-Granda, Giuseppe Loianno
-
领域关键词:多机器人协作感知、真实世界数据集、空地协同、多模态传感、场景理解
-
要解决的问题:多机器人协作感知很有前景,但真正推进这类算法研究的一个大障碍是缺少真实世界数据集。现有很多公开数据集更偏向 SLAM,而不是专门支持多机器人之间的异构、异步、有限带宽、视角互补的协作感知研究。
-
解决方法:作者构建了 CoPeD,一个面向真实环境的多机器人协作感知数据集。它利用空中机器人和地面机器人在视角、机动性、覆盖范围和传感器模态上的互补性,提供原始传感器输入、位姿估计以及可选的高层感知标注。数据采集设计中特别强调“视角重叠足够、范围多样化”,以便研究真正有用的协作感知算法,而不仅是单机感知或纯 SLAM。
-
解决效果:论文通过多个协作感知任务定性展示了数据集价值,说明它能支撑多模态、多机器人场景理解研究。摘要里没有给出量化 benchmark 数字,但明确指出该数据集填补了真实世界多机器人协作感知数据缺口,能帮助后续研究更系统地评估算法。
【Paper 12】《Learning to Fly in Seconds / 几秒钟内学会飞行》
-
机构:纽约大学坦登工程学院 New York University Tandon School of Engineering;阿联酋技术创新研究所自主机器人研究中心 Autonomous Robotics Research Center, Technology Innovation Institute
-
作者:Jonas Eschmann, Dario Albani, Giuseppe Loianno
-
领域关键词:强化学习、四旋翼控制、仿真到现实迁移、端到端控制、快速训练
-
要解决的问题:用强化学习控制四旋翼很吸引人,因为它有潜力减少人工调参、提高性能、增强泛化能力,但现实中常卡在两个痛点上:一是训练时间太长,二是仿真里学得好,迁移到真机时却会被 sim-to-real gap 卡住。
-
解决方法:作者提出一种新的非对称 actor-critic 架构,并配合高可靠性的强化学习训练范式来做端到端四旋翼控制。方法上不只是换网络结构,还结合课程学习和高度优化的仿真器来提高样本效率;同时给出一个针对多旋翼控制层级、非线性和域参数的分类体系,帮助更清楚地区分不同抽象层面的控制问题。整个框架的目标是直接学习 RPM 级控制,并把策略部署到微控制器上实现实时运行。
-
解决效果:这是这篇论文最亮眼的地方。作者声称只需要在消费级笔记本电脑上训练
18 秒,就能完成从仿真到真实四旋翼的直接 RPM 控制迁移;其自研模拟器甚至可以在笔记本 GPU 上达到“每秒模拟约 5 个月飞行”的速度。真机实验基于 Crazyflie nano quadrotor,与现有 SOTA 控制方案相比,轨迹跟踪性能具有竞争力,说明它不仅训练快,而且确实能飞起来、用起来。
【Paper 13】《Decomposition-based Hierarchical Task Allocation and Planning for Multi-Robots under Hierarchical Temporal Logic Specifications / 分层时序逻辑规范下基于分解的多机器人分层任务分配与规划》
-
机构:卡内基梅隆大学机器人研究所 Robotics Institute, Carnegie Mellon University;浙江大学控制科学与工程学院 College of Control Science and Engineering, Zhejiang University
-
作者:Xusheng Luo, Shaojun Xu, Ruixuan Liu, Changliu Liu
-
领域关键词:多机器人系统、时间逻辑、任务分配、规划、形式化方法
-
要解决的问题:随着任务越来越复杂,用单个 LTL 公式描述多机器人任务会变得非常长,不仅难写、难理解,也会让规划计算量越来越大。已有分层 LTL 表达虽然更清晰,但又常常默认每个规范内部的机器人彼此独立,这会限制其处理复杂协作约束的能力。
-
解决方法:作者提出一个基于分解的分层框架。高层先把每个时序逻辑规范拆成原子子任务,再推断不同规范之间子任务的时间关系,构造出任务网络;随后用混合整数线性规划把这些子任务分配给不同机器人。低层则由具体领域控制器执行子任务,因此整个方法兼顾了形式化约束表达、任务分配和可落地执行。
-
解决效果:作者把方法应用到导航和操作两个领域,并通过仿真验证效果。摘要中的核心结论是,该框架能用更少运行时间找到更优解,这说明它不只是让问题“更好描述”,而是在求解效率和结果质量上都优于已有方案。
【Paper 14】《A Hybrid Haptic Device for Virtual Car Door Interactions: Design and Implementation / 用于虚拟车门交互的混合触觉设备:设计与实现》
-
机构:韩国科学技术院机械工程系 Department of Mechanical Engineering, Korea Advanced Institute of Science and Technology
-
作者:Jihyeong Ma, Ji-Sung Kim, Ki-Uk Kyung
-
领域关键词:混合触觉设备、虚拟样机、车门交互、动觉反馈、汽车设计
-
要解决的问题:汽车设计里做真实车门样机既贵又慢,而只靠纯虚拟界面又很难准确模拟车门那种有惯性、有摩擦、有阻尼的手感。尤其如果只用高扭矩电机去模拟车门,用户安全风险也会上升。
-
解决方法:作者设计了一种混合式触觉设备,把伺服电机和磁粉制动器组合起来分别承担不同类型的力反馈。论文先实验测量真实车门的扭矩曲线,分析其中由门止动器和铰链带来的显著摩擦,再把扭矩分成主动和被动两部分,分别交给电机和制动器渲染。这样既能更真实地还原车门动力学,又避免单一大扭矩电机带来的安全隐患。
-
解决效果:实验结果表明,该设备与控制方法能够较准确地渲染车门的动觉触觉反馈。虽然摘要没有给出误差数值,但明确说明系统成功复现了车门交互中的关键力学特征,并证明它适合作为汽车设计中的高效虚拟原型工具。
【Paper 15】《Dynamic Importance-Weighted Fusion Network Based on Dynamic Convolutions for Hand Posture Recognition / 基于动态卷积与动态重要性加权融合网络的手势识别方法》
-
机构:河北大学网络空间安全与计算机学院 School of Cyber Security and Computer, Hebei University;河北省机器视觉工程研究中心 Machine Vision Engineering Research Center of Hebei Province;北京理工大学机电工程学院 School of Mechatronical Engineering, Beijing Institute of Technology
-
作者:Jing Qi, Li Ma, Yushu Yu
-
领域关键词:手势识别、RGB-D 融合、动态卷积、多模态融合、机器人感知
-
要解决的问题:单独使用 RGB 图像做手势识别时,容易受光照和背景干扰;单独使用深度图时,又容易丢掉细节。虽然 RGB 和深度融合是自然思路,但很多传统融合方法给不同模态分配的是固定权重,遇到复杂场景时不够灵活,识别性能会下降。
-
解决方法:作者提出 DIWFNet,一种基于双分支 YOLOv5 的 RGB-D 融合网络。核心在于四个 Fusion 模块,分别通过 MSGE 做多尺度特征提取与门控、CSDF 根据上下文动态调整模态权重、IWF 进行重要性加权融合。整体思想是让网络在不同场景下动态决定“更相信 RGB 还是更相信深度”,并通过自适应特征卷积更精准地建模两种模态之间的复杂关系。
-
解决效果:论文在 CUG、NTU 和自建数据集上都取得了优异表现,并已成功部署到真实机器人场景中。摘要没有列出具体准确率,但明确强调该方法在精度和鲁棒性上都有提升,说明它不仅在 benchmark 上有效,也具备一定实际落地能力。
【Paper 16】《Panoptic Segmentation with Partial Annotations for Agricultural Robots / 基于部分标注的农业机器人全景分割》
-
机构:波恩大学 University of Bonn;牛津大学工程科学系 Department of Engineering Science, University of Oxford;Lamarr 机器学习与人工智能研究所 Lamarr Institute for Machine Learning and Artificial Intelligence
-
作者:Jan Weyler, Thomas Läbe, Jens Behley, Cyrill Stachniss
-
领域关键词:农业机器人、全景分割、弱监督学习、部分标注、田间场景理解
-
要解决的问题:农业机器人若想精准识别田里的单株植物,通常需要做全景分割,但这类模型往往依赖像素级密集标注。问题是农业场景标注成本特别高,既费时间又依赖领域专家,严重限制了数据规模和算法迭代速度。
-
解决方法:作者提出一种基于部分标注的训练方法,只需要每张图中一部分像素有真值,而不是整张图都做密集标注。为了弥补监督信号不足,论文设计了一组新的损失函数,引入类似物理学向量场中的散度和旋度概念,对没有标注的区域也能提供有效约束。这样既降低标注成本,又尽量不牺牲模型质量。
-
解决效果:实验结果表明,该方法优于多种同样致力于降低标注需求的现有 SOTA 方法。虽然摘要没有写出具体 mIoU 或 PQ 数值,但结论很明确:在减少人工标注的前提下,模型仍然能取得很强的全景分割性能,这对农业机器人应用非常有现实意义。
【Paper 17】《Workspace Expansion of Magnetic Soft Continuum Robot using Movable Opposite Magnet / 利用可移动异向磁体扩展磁性软连续体机器人的工作空间》
-
机构:大邱庆北科学技术院 Daegu Gyeongbuk Institute of Science and Technology
-
作者:Joowon Park, Hyeonwoo Kee, Sukho Park
-
领域关键词:磁性软连续体机器人、微创手术、导管机器人、磁驱动、工作空间扩展
-
要解决的问题:磁性软连续体机器人很适合微创手术,但现有结构的灵巧性和可达工作空间仍然有限。即便已有带相反磁体的结构能提升灵活度,仍然存在工作空间不足、姿态变化范围受限的问题。
-
解决方法:作者提出 MSCR-MOM,在软连续体机器人尖端磁体之外,再引入一个位置可变的异向磁体,使系统能主动调节这个“对抗磁体”的位置,从而改变整体磁驱响应。论文不仅提出了直径
2.2 mm、长度10 cm的原型,还建立了分析模型,并用仿真和实验系统研究其运动特性。 -
解决效果:作者通过仿真和多组实验验证了工作空间确实得到扩展,并进一步用体模实验验证了临床适用性。摘要没有给出具体扩大比例,但论文的主结论很明确:相比现有 MSCR 与 MSCR-OM,新结构在工作空间和应用潜力上都有实质提升,有望进一步发展为临床导管。
【Paper 18】《A Cylindrical Halbach Array Magnetic Actuation System for Longitudinal Robot Actuation Across 2D Workplane / 面向二维工作平面纵向驱动的圆柱形 Halbach 阵列磁驱动系统》
-
机构:香港中文大学机械与自动化工程学系 Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong;T Stone Robotics Institute;多尺度医学机器人中心 Multi-Scale Medical Robotics Center
-
作者:Hongzhe Sun, Shing Shin Cheng
-
领域关键词:磁驱动、Halbach 阵列、微型机器人、手术机器人、二维工作平面
-
要解决的问题:现有圆柱形 Halbach 阵列虽然能提供强磁场和较大工作空间,但纵向驱动力通常只能沿中心轴产生。换句话说,真正能用的操控区域其实很窄,若要对病人解剖结构内的机器人做操作,就常常需要把目标“搬到轴线上”,这在临床中非常受限。
-
解决方法:作者设计了一种新的圆柱形 Halbach 阵列磁驱系统,使其能在 2D 工作平面上产生带纵向梯度的磁场,而不仅仅是在中心轴方向上有力。实现上,论文通过优化周向排列的 Halbach 行的磁体尺寸与滚转角,并合理配置磁体节距角,让磁场方向和梯度方向保持共对齐,从而实现 tip-leading 的机器人纵向运动。
-
解决效果:作者先做了模型驱动仿真优化,再进行实验验证。结果表明,该系统能够在工作平面内不同位置、以不同速度稳定驱动一个直径
2 mm的磁性机器人做纵向运动,把原本接近1D的纵向力覆盖扩展到了2D平面,这对临床磁操控机器人的实用化是一个明显进步。
【Paper 19】《A Pragmatic Approach to Bi-directional Impedance Reflection Telemanipulation Control: Design and User Study / 双向阻抗反射远程操纵控制的实用方法:设计与用户研究》
-
机构:特温特大学 University of Twente;TNO;Vassar College
-
作者:Robin Lieftink, Sara Falcone, Christophe van der Walt, Jan van Erp, Douwe Dresscher
-
领域关键词:远程操纵、双边控制、阻抗反射、力反馈、用户研究
-
要解决的问题:远程操纵里加入力反馈通常能提升操作效果和沉浸感,但只要通信有时延,系统透明性和稳定性就容易变差。很多传统双边阻抗控制在低延迟下还能接受,一旦延迟稍微增加,用户体验和任务性能都会明显下降。
-
解决方法:作者实现了一个早在 1989 年就提出但一直没有完整落地的双向阻抗反射控制器。核心思路是把操作者阻抗和环境阻抗分别反射回远端机器人和本地触觉接口,同时加入轨迹预测器补偿延迟带来的运动滞后。为了验证实用性,论文把它与带 passivity layer 的经典双边阻抗控制器做了直接对比。
-
解决效果:用户研究包含
0 ms、10 ms、20 ms单向延迟三组,每组10名参与者,使用两种控制器完成不同任务。结果显示,在10 ms和20 ms延迟组中,双向阻抗反射控制器在任务表现、用户体验和身体临场感上都显著更好。论文还指出,这是首次实证表明该方法能在至少20 ms延迟下有效工作。
【Paper 20】《Fast Contact-Implicit Model Predictive Control / 快速接触隐式模型预测控制》
-
机构:斯坦福大学机械工程系 Department of Mechanical Engineering, Stanford University;卡内基梅隆大学机器人研究所 The Robotics Institute, Carnegie Mellon University
-
作者:Simon Le Cleac’h, Taylor A. Howell, Shuo Yang, Chi-Yen Lee, John Zhang, Arun Bishop, Mac Schwager, Zachary Manchester
-
领域关键词:模型预测控制、接触动力学、四足机器人、优化控制、接触隐式规划
-
要解决的问题:很多机器人任务都涉及与环境建立和断开接触,例如腿足运动、支撑、跨步、推物体等。传统 MPC 通常假设接触模式已经固定或提前给定,但真实任务里接触时机和接触模式往往恰恰是最关键、也最难预先指定的部分。
-
解决方法:作者提出接触隐式模型预测控制 CI-MPC,把线性 MPC 推广到接触丰富场景。其核心是一个双层规划框架:下层用基于参考轨迹泰勒展开得到的时变线性互补问题来建模接触动力学,上层则在此基础上同时推理接触时机、接触力和接触模式序列。为了让这套方法真正跑得动,作者还专门设计了利用结构的内点求解器和定制轨迹优化器,以提升数值收敛速度和实时性。
-
解决效果:论文在四足机器人硬件实验中展示了实时求解能力,并能在线生成和跟踪非周期行为,而不需要事先写死接触模式。仿真中还验证了该控制器对模型失配具有鲁棒性,并能在 pushbot、平面 hopper、平面 quadruped、平面 biped 等多种系统上通过发现新接触模式来应对扰动。这说明 CI-MPC 不只是理论上更通用,而且在速度和实际控制效果上都达到了可用水平。