【5】ICRA2025_1_10 文章汇总1-10
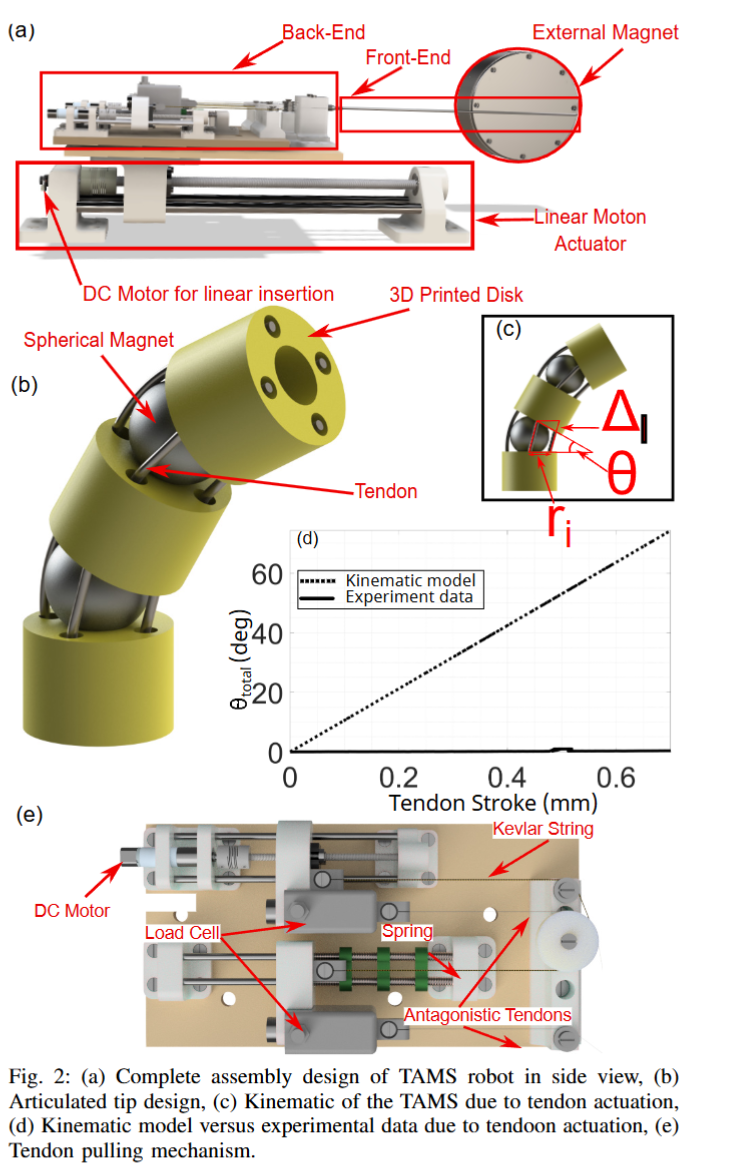
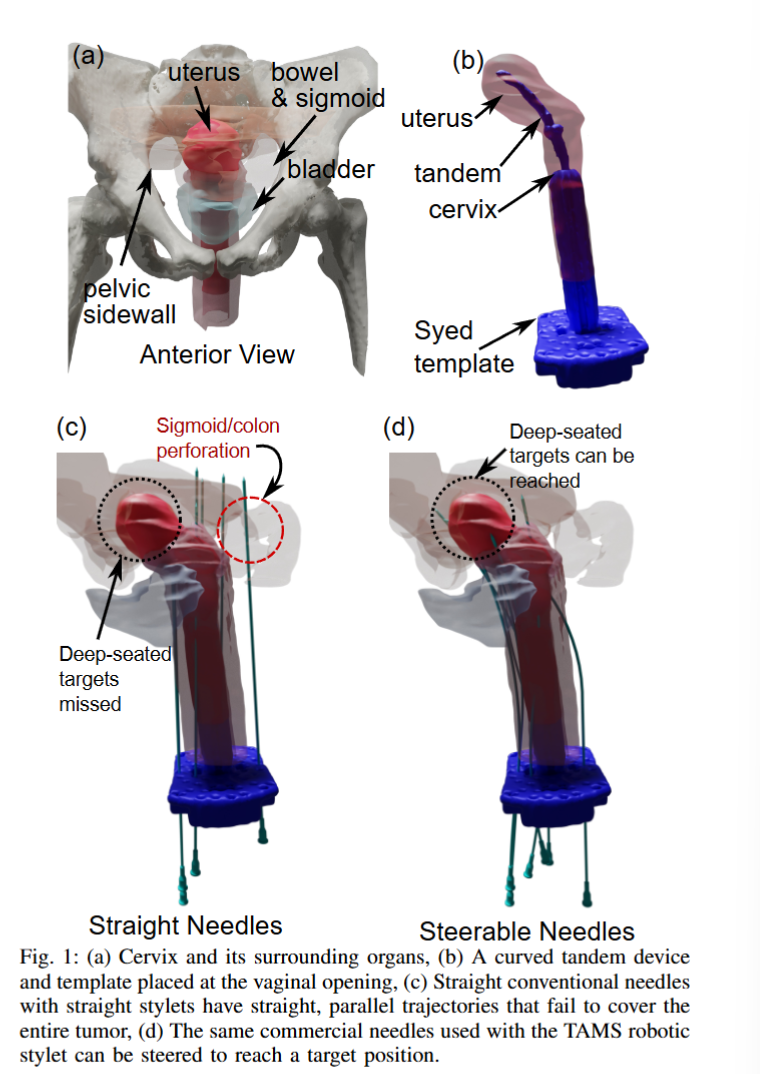
【Paper 1】《Towards a Tendon-Assisted Magnetically Steered (TAMS) Robotic Stylet for Brachytherapy / 面向近距离放疗的腱辅助磁控转向(TAMS)机器人针芯》
-
机构:路易斯维尔大学斯皮德工程学院医疗机器人与远程手术实验室 Healthcare Robotics and Telesurgery (HeaRT) Laboratory, Speed School of Engineering, University of Louisville;路易斯维尔大学健康布朗癌症中心 University of Louisville Health Brown Cancer Center
-
作者:Pejman Kheradmand, Behnam Moradkhani, Harshith Jella, Keith Sowards, Scott R. Silva, Yash Chitalia
-
领域关键词:近距离放疗、可转向针、磁驱动、腱驱动、连续体机器人、Cosserat 杆建模
-
要解决的问题:(人话)传统近距离放疗常常要插很多根直针才能包住深部肿瘤,不仅操作麻烦,而且在复杂病灶里剂量覆盖也未必理想。作者想做一个能在组织里“拐弯”的超细针芯,让医生更精准地把针送到目标位置。
-
研究背景:组织间近距离放疗往往需要多达 20 根直针围绕肿瘤布置。对于更复杂或位置更刁钻的肿瘤,直针方案可能导致剂量分布不够理想。可转向针芯能在组织中引导针前进,从而提升手术精度,并减少所需针数。
-
主要贡献:提出一种新型 TAMS 机器人针芯,把磁驱动和腱驱动结合起来,在仅 1.4 mm 外径下同时兼顾足够柔顺的弯曲能力和轴向刚度;建立双管 Cosserat 杆模型,统一描述腱驱动、外部磁场以及两者联合作用下的系统行为。
-
实验方法与结果:作者在自由空间中验证了模型,并在仿体组织中测试了针的转向能力。结果表明,该系统能够实现较大曲率的组织内转向,证明双驱动方案和建模方法可行。
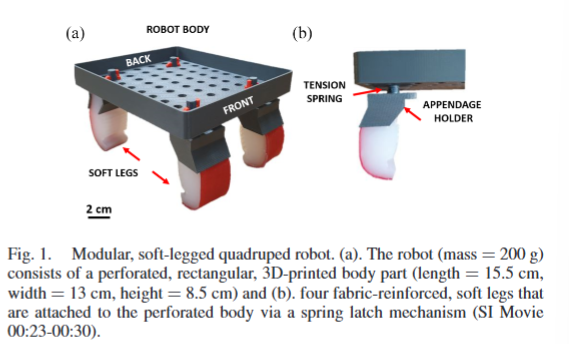
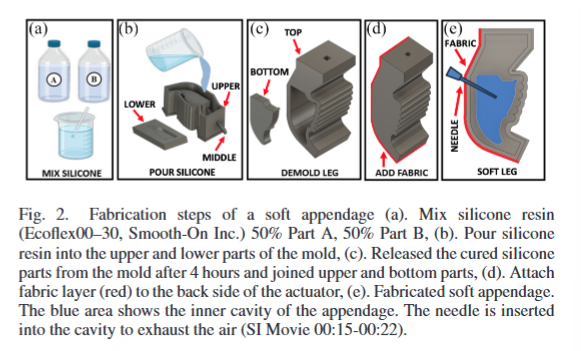
【Paper 2】《Utilizing Bioinspired Soft Modular Appendages for Grasping and Locomotion in Multi-Legged Robots on Ground and Underwater / 用于地面与水下多足机器人抓取和运动的仿生软体模块化附肢》
-
机构:圣母大学电气工程系 Department of Electrical Engineering, University of Notre Dame
-
作者:Abu Nayem Md. Asraf Siddiquee, Yasemin Ozkan-Aydin
-
领域关键词:软体机器人、模块化附肢、多足机器人、地面运动、水下运动、抓取
-
要解决的问题:(人话)软体机器人虽然适应复杂地形很厉害,但腿太软就蹬不动地面,太硬又失去柔顺性。作者想做一种既能爬、又能游、还能抓东西的软体“万能腿/手”。
-
研究背景:软体机器人适合灾后救援和农业等复杂环境,但地面机器人必须在“足够柔软以适应环境”和“足够刚硬以产生推进力”之间取得平衡。如何用简单、便宜、可复用的方式做出兼顾运动和操作的软体附肢,是一个关键问题。
-
主要贡献:提出一种气动驱动的硅胶软体模块化附肢;利用有限元分析和阻挡力分析验证其弯曲与出力能力;构建软硬结合的系留式机器人原型;进一步通过增加两条软附肢实现抓取与搬运功能。
-
实验方法与结果:作者在地面和水下环境中测试机器人前进、后退、转弯性能,并验证了抓取和运输不同物体的能力,包括 3D 打印塑料盒和鸡蛋等易碎物体;同时评估了其在陆地和水介质中的载荷能力,表明该设计兼具运动和操作潜力。
【Paper 3】《Harnessing Flagella Dynamics for Enhanced Robot Locomotion at Low Reynolds Number / 利用鞭毛动力学提升低雷诺数环境下的机器人运动能力》
-
机构:圣母大学电气工程系 Department of Electrical Engineering, University of Notre Dame
-
作者:Nnamdi Chikere, Yasemin Ozkan-Aydin
-
领域关键词:仿生机器人、鞭毛推进、低雷诺数运动、微型机器人、可变柔度
-
要解决的问题:(人话)在黏性主导的微观流体环境里,机器人想游得快非常难。作者想弄清楚:如果像微生物那样在划动过程中动态改变“鞭毛”的软硬程度,能不能让机器人游得更快。
-
研究背景:低雷诺数环境中,惯性几乎不起作用,运动必须依靠非互易的形变循环。藻类和细菌依靠柔性纤毛与鞭毛高效推进,但其中“柔度变化怎样影响推进速度”仍未被充分理解。
-
主要贡献:设计了一个受藻类启发的四鞭毛缆驱机器人,由单个直流电机驱动四根多段鞭毛,并在推进周期内调节其刚度;重点研究回摆和前摆阶段差异化柔度对推进性能的影响,同时分析鞭毛数量和长度的作用。
-
实验方法与结果:实验结果显示,采用策略性柔度调节后,机器人推进速度显著提升,达到
0.7 ± 0.11 cm/cycle;同时,作者总结了鞭毛长度与数量对推进效果的影响,为微流控和生物医学微机器人设计提供了参考。
【Paper 4】《Integrated Barometric Pressure Sensors on Legged Robots for Enhanced Tactile Exploration of Edges / 用于增强腿式机器人边缘触觉探索的集成式气压传感足端》
-
机构:根特大学动态设计实验室 Dynamic Design Lab (D2LAB), Department of Electromechanical, Systems and Metal Engineering, Ghent University
-
作者:Thijs Van Hauwermeiren, Anatolii Sianov, Annelies Coene, Guillaume Crevecoeur
-
领域关键词:腿式机器人、触觉感知、边缘检测、足端传感器、软传感器
-
要解决的问题:(人话)腿式机器人走到台阶边、坡边或者悬空边缘时,只靠普通力传感器不够“聪明”,容易判断不准。作者想让机器人的脚自己“摸出”边缘的方向和位置。
-
研究背景:触觉感知能显著拓展腿式机器人在复杂环境中的安全性和适应性,尤其适用于边缘检测与探索。但足端传感器既要扛得住反复冲击,又要能从触觉数据里判断接触类型和边缘方向。
-
主要贡献:提出一种将多个气压传感器封装在可变形橡胶球中的新型触觉足端,并部署在 Unitree Go1 四足机器人上;同时设计触觉接触框架,对接触状态进行“无接触/平面/边缘”分类,并估计边缘相对机器人底座的方向。
-
实验方法与结果:作者在不同地形、负载变化、动态扰动和斜边条件下做了大量实验,并与原始标量力传感器进行对比。结果显示,该方法在
14 mm检测范围内可将边缘方向预测的平均绝对误差控制在2°,且在真实工况下表现稳健。
【Paper 5】《A Morphing Quadrotor-Blimp with Balloon Failure Resilience for Mobile Ecological Sensing / 面向移动生态感知的具备气囊失效韧性的变形四旋翼飞艇》
-
机构:代尔夫特理工大学网络化系统组 Networked Systems, Faculty of Electrical Engineering, Mathematics and Computer Science, TU Delft;代尔夫特理工大学仿生智能实验室 Biomorphic Intelligence Lab, Faculty of Aerospace Engineering, TU Delft
-
作者:Suryansh Sharma, Mike Verhoeff, Floor Joosen, RR. Venkatesha Prasad, Salua Hamaza
-
领域关键词:飞艇-无人机混合平台、变形飞行器、失效恢复、生态监测、遥感
-
要解决的问题:(人话)氦气飞艇很适合长时间巡检和生态监测,但气囊一旦破了,基本就直接坠。作者想做一台“气囊坏了也能自救”的飞艇无人机。
-
研究背景:飞艇在大范围生态监测中很有价值,因为续航长、覆盖范围大,但它们通常欠驱动且高度依赖单一气囊,一旦气囊故障就面临单点失效风险。相比之下,失效韧性四旋翼研究较多,而失效韧性飞艇研究很少。
-
主要贡献:提出混合式飞艇-四旋翼平台 Janus,集成气囊失效检测与恢复机制;平台平时以飞艇模式实现全向移动,失效时通过触发机构将四个旋翼旋转到四旋翼构型;同时利用多传感器融合实现快速可靠的气囊故障检测。
-
实验方法与结果:实验表明,Janus 在飞艇模式下可实现全向机动;在气囊故障发生后,检测响应时间约为
66 ms,并能在90%情况下于0.362 s内完成向四旋翼模式的变形与恢复,验证了平台的失效韧性。
【Paper 6】《Connectivity-preserving distributed informative path planning for mobile robot networks / 面向移动机器人网络的保连通分布式信息路径规划》
-
机构:中佛罗里达大学电气与计算机工程系 Department of Electrical and Computer Engineering, University of Central Florida;澳大利亚联邦大学创新、科学与可持续发展研究所 Institute of Innovation, Science and Sustainability, Federation University Australia;内华达大学里诺分校先进机器人与自动化实验室 Advanced Robotics and Automation (ARA) Lab, University of Nevada, Reno;德州农工大学科珀斯克里斯蒂分校工程系 Department of Engineering, Texas A&M University-Corpus Christi
-
作者:Binh Nguyen, Truong X. Nghiem, Linh Nguyen, Hung M. La, Thang Nguyen
-
领域关键词:多机器人网络、信息路径规划、分布式优化、高斯过程、连通性保持
-
要解决的问题:(人话)多台机器人一起去探索环境时,既要采到最有价值的数据,又不能彼此“失联”,还得避免撞车。作者要解决的是这种多目标兼顾的路径规划问题。
-
研究背景:移动机器人网络在环境感知中通常需要边走边采集带噪声的观测,并用局部数据建立空间场模型。若采用集中式规划,计算和通信压力都会很大,因此需要能够分布式求解、同时保证网络连通性的规划框架。
-
主要贡献:把分布式信息路径规划问题建模为一个带有连通性保持和避碰约束的多步预测优化问题;在规划中联合优化局部高斯过程模型的共享超参数;采用近端交替方向乘子法实现分布式求解,并从理论上证明网络连通性保持与解收敛到驻点。
-
实验方法与结果:作者通过合成实验并结合真实世界数据集进行验证。结果表明,该方法能够在分布式场景下有效完成空间场探索,同时维持网络连通性并获得有价值的环境信息。
【Paper 7】《A Perturbation-Robust Framework for Admittance Control of Robotic Systems With High-Stiffness Contacts and Heavy Payload / 面向高刚度接触与重载任务的机器人导纳控制抗扰框架》
-
机构:慕尼黑机器人与机器智能研究所 Munich Institute of Robotics and Machine Intelligence (MIRMI), Technical University of Munich;乌干达坎帕拉 Kyambogo 大学机械与生产工程系 Department of Mechanical and Production Engineering, Kyambogo University;弗劳恩霍夫生产系统与设计技术研究所 Fraunhofer IPK;帕多瓦大学管理与工程系 Department of Management and Engineering, University of Padova;大邱庆北科学技术院 Daegu Gyeongbuk Institute of Science and Technology (DGIST)
-
作者:Kangwagye Samuel, Kevin Haninger, Roberto Oboe, Sami Haddadin, Sehoon Oh
-
领域关键词:导纳控制、抗扰观测器、力控制、接触丰富操作、重载机械臂、人机协作
-
要解决的问题:(人话)机械臂做重载装配、打磨或人机协作时,想在硬接触表面上既“够柔顺”又“够稳定”并不容易,尤其工业机器人里层控制常常是黑盒,导纳控制带宽和抗扰性能都会受限。
-
研究背景:串联机械臂在高刚度接触和人机共操作场景中,需要渲染较高导纳以减小接触力并保持稳定接触。但内环动力学会限制外环导纳可实现的带宽,扰动和工业机器人常见的黑盒 PD 位置控制也会进一步削弱控制效果。
-
主要贡献:提出一个面向重载接触任务的抗扰导纳控制框架;设计广义扰动鲁棒观测器 PROB,结合关节速度测量、内环速度控制模型与接触力测量来适应不同接触刚度;进一步提出三类 PROB,包括新的 Combined Dynamics Observer (CDYOB),以突破内环带宽限制并实现更宽范围的导纳渲染。
-
实验方法与结果:论文给出了理论分析,并在工业机器人平台上开展实验。结果表明,所提方法能在高刚度接触和重载条件下稳定实现更好的导纳控制效果,验证了框架的有效性。
【Paper 8】《Initial Task Allocation in Multi-Human Multi-Robot Teams: An Attention-enhanced Hierarchical Reinforcement Learning Approach / 多人与多机器人团队中的初始任务分配:一种注意力增强的分层强化学习方法》
-
机构:普渡大学 SMART 实验室 SMART Laboratory, Department of Computer and Information Technology, Purdue University;北京化工大学机电工程学院 College of Mechanical and Electrical Engineering, Beijing University of Chemical Technology
-
作者:Ruiqi Wang, Dezhong Zhao, Arjun Gupte, Byung-Cheol Min
-
领域关键词:多人与多机器人团队、初始任务分配、分层强化学习、注意力机制、长时程决策
-
要解决的问题:(人话)在人和机器人混编的大团队里,任务一开始如果分配得不好,后面会越来越乱。作者想解决的是:面对大规模、异构、长周期任务,怎么一开始就把任务分得更合理。
-
研究背景:多人与多机器人团队在复杂任务中很有潜力,但成员能力各不相同,任务也可能跨度长、结构复杂。现有强化学习方法虽然有一定效果,但在大规模团队和长时程任务场景下,往往难以处理状态空间复杂性与任务多样性。
-
主要贡献:提出一种注意力增强的分层强化学习框架,将复杂的初始任务分配问题拆解为更结构化的子问题;进一步引入分层跨属性注意力机制 HCA,使各层子策略能够更聚焦于各自决策阶段真正关键的状态信息。
-
实验方法与结果:作者通过环境监视案例研究进行验证。结果显示,该方法及其 HCA 机制能够带来更高效的任务分配效果,说明其适合处理复杂的多主体协同分配问题。
【Paper 9】《DRAGON: A Dialogue-Based Robot for Assistive Navigation With Visual Language Grounding / DRAGON:具有视觉语言对齐能力的辅助导航对话机器人》
-
机构:伊利诺伊大学厄巴纳-香槟分校电子与计算机工程系 Department of Electrical and Computer Engineering, University of Illinois Urbana-Champaign;伊利诺伊大学厄巴纳-香槟分校应用健康科学系 Department of Applied Health Sciences, University of Illinois Urbana-Champaign
-
作者:Shuijing Liu, Aamir Hasan, Kaiwen Hong, Runxuan Wang, Peixin Chang, Zachary Mizrachi, Justin Lin, D. Livingston McPherson, Wendy A. Rogers, Katherine Driggs-Campbell
-
领域关键词:辅助导航、视觉语言对齐、人机对话、语义导航、视障辅助
-
要解决的问题:(人话)视障人士不仅需要“往哪走”的导航,还需要知道“周围是什么”。作者希望机器人既能带路,又能像向导一样听懂自然语言、解释环境并回答问题。
-
研究背景:现有导盲和寻路技术往往只强调导航本身,或者只能提供很有限的环境信息;还有一些系统依赖 RFID、蓝牙信标等特殊基础设施。随着视觉语言 grounding 和语义导航的发展,有机会把环境语义理解、对话交互和导航结合起来。
-
主要贡献:提出 DRAGON 对话式辅助导航机器人,利用自然语言对话理解用户意图,并把自由形式语言与环境中的地标和视觉观察进行对齐;系统既能引导用户前往目标,也能描述环境并回答基于视觉观察的问题。
-
实验方法与结果:作者在日常室内环境中对蒙眼参与者开展用户研究。结果表明,DRAGON 能较顺畅地与用户交流,提供良好的引导体验,并让用户以更直观的方式理解周围环境。
【Paper 10】《Fieldscale: Locality-Aware Field-based Adaptive Rescaling for Thermal Infrared Image / Fieldscale:面向热红外图像的局部性感知场式自适应重标定》
-
机构:首尔国立大学机械工程系 Department of Mechanical Engineering, Seoul National University
-
作者:Hyeonjae Gil, Myung-Hwan Jeon, Ayoung Kim
-
领域关键词:热红外成像、图像重标定、自适应增益、局部感知、视觉感知
-
要解决的问题:(人话)热红外相机拍出来的原始图像是 14 位的,实际应用常要压成 8 位。传统方法只按像素亮度做全局映射,常常把局部热源附近的细节压坏。作者想让热红外图像在压缩位深后依然清晰、稳定、信息损失更少。
-
研究背景:热红外相机不受外部光照影响,在安全和机器人感知场景很有潜力。但原始 TIR 图像位深高,必须先做重标定。以往的全局 1D LUT 方法,无论线性还是非线性,都难同时兼顾全局对比度与局部细节,而且某些高质量方案依赖特定硬件,不利于复现和扩展。
-
主要贡献:提出 Fieldscale,用局部性感知的 2D 场来联合编码像素强度和空间上下文,为图像不同区域自适应分配像素增益;相比传统 1D LUT,它更能处理局部热源造成的非均匀分布,并生成空间一致的 8 位热红外图像。
-
实验方法与结果:论文在图像质量评估以及两个下游任务上验证了方法有效性。结果显示,Fieldscale 能稳定提升图像可见性并减少信息损失,代码也已公开,便于后续研究复现与应用。